
Robôs bio-híbridos microscópicos impulsionados por músculos e nervos
Se gostarem do conteúdo dêem um joinha 👍 na página do Código Fluente no
Facebook
Esse é o link do código fluente no Pinterest
Meus links de afiliados:
Hostinger
Digital Ocean
One.com
Pesquisadores constroem robôs bio-híbridos microscópicos impulsionados por músculos e nervos
Artigo publicado em 16/09/2019 às 14:00 horas em https://news.illinois.edu/view/6367/802738
Dispositivos robóticos flexível
Na universidade de Illinois, pesquisadores desenvolveram dispositivos robóticos flexível, acionados por tecido neuromuscular, que são disparados quando estimulados pela luz, aproximando a engenharia mecânica do desenvolvimento de biobots autônomos.
Em 2014, equipes de pesquisa lideradas pelo professor de ciência e engenharia mecânica Taher Saif e o professor de bioengenharia Rashid Bashir, da Universidade de Illinois, trabalharam juntos para desenvolver os primeiros biorobores que nadam e caminham, são bio-híbridos autopropulsores, alimentados por células musculares cardíacas derivadas de ratos.
Equipe
A equipe de pesquisa inclui: o professor Taher Saif, o aluno Onur Aydin, o aluno Xiastian Zhang, o professor Mattia Gazzola, o aluno Gelson J. Pagan-Diaz, e o professor e reitor da Grainger College of Engineering, Rashid Bashir.
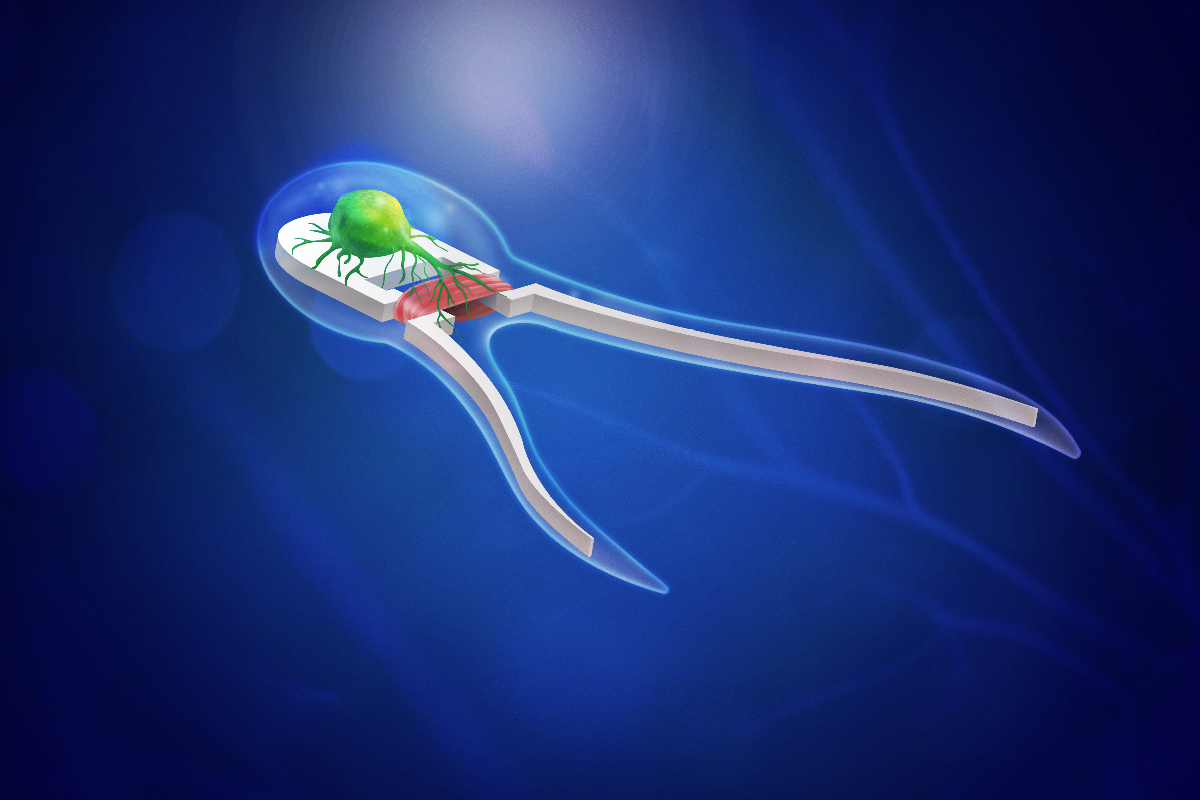
Dispositivos robóticos bio-híbridos. Imagem cedida por Michael Vincent
Desenvolvimento
“Nosso primeiro estudo de nadador demonstrou com sucesso que os bots, modelados após as células espermáticas, podiam nadar”, disse Saif.
“Essa geração de bots de cauda simples utilizou tecido cardíaco que bate por si só, mas não conseguiam sentir o ambiente ou tomar qualquer decisão. ”
Em um novo estudo publicado no Proceedings of the National Academy of Sciences e liderado por Saif.
Os pesquisadores demonstram uma nova geração de bots bicaudais alimentados por tecido muscular esquelético estimulado por neurônios motores on-board.
Estimulação óptica direta
Os neurônios têm propriedades optogenéticas: Após a exposição à luz, os neurônios disparam cargas elétricas para acionar os músculos.
“Aplicamos uma cultura de células neuronais optogenéticas, derivada de células-tronco de camundongos, adjacentes ao tecido muscular”, disse Saif.
“Os neurônios avançaram em direção ao músculo e formaram junções neuromusculares, e o nadador montou-se, no sentido de se auto fabricar, por conta própria”.
Refinando
Depois de confirmar que o tecido neuromuscular era compatível com seus esqueletos do biorobô sintético, a equipe trabalhou para otimizar as habilidades do nadador.
“Usamos modelos computacionais, liderados pelo professor de ciência e engenharia mecânica Mattia Gazzola, para determinar quais atributos físicos levariam à natação mais rápida e eficiente”, disse Saif.
“Por exemplo, analisamos variações no número de caudas e comprimentos de cauda para o design mais eficiente do nadador bio-híbrido.”
Limitações
“Como os atuadores biológicos, ou biobots, não são tão maduros quanto outras tecnologias, eles são incapazes de produzir grandes forças.
Isso dificulta o controle dos movimentos”, disse Gazzola.
“É muito importante projetar cuidadosamente a estrutura sobre a qual os biobots crescem e interagir com eles para tirar o máximo proveito da tecnologia e alcançar as funções de locomoção.
As simulações de computador que executamos desempenham um papel crítico nessa tarefa, pois podemos abranger vários projetos possíveis e selecionar apenas os mais promissores para testes na vida real.”
“A capacidade de impulsionar a atividade muscular com neurônios abre caminho para uma maior integração de unidades neurais nos sistemas bio-híbridos”, disse Saif.”
“Dada a nossa compreensão do controle neural em animais, pode ser possível avançar no projeto neuromuscular bio-híbrido usando uma organização hierárquica de redes neurais”.
Concluindo
Saif disse que ele e sua equipe vislumbram esse avanço, levando ao desenvolvimento de sistemas vivos de engenharia multicelular com a capacidade de responder de maneira inteligente às sugestões ambientais para aplicações em tecnologias de bioengenharia, medicina e materiais de autocura.
No entanto, a equipe reconhece que – como os organismos vivos – não existem duas máquinas bio-híbridas exatamente iguais.
“Assim como os gêmeos não são realmente idênticos, duas máquinas projetadas para desempenhar a mesma função não serão as mesmas”, disse Saif.
“Uma delas pode se mover mais rápido ou curar-se de danos de maneira diferente da outra – um atributo exclusivo das máquinas vivas”.
National Science Foundation Science and Technology Center – Comportamento Emergente para Sistemas Celulares Integrados e a concessão de Fronteiras Emergentes da NSF em Pesquisa e Inovação apoiaram esta pesquisa.
Materiais fornecidos pela University of Illinois at Urbana-Champaign.
Original escrito por Lois Yoksoulian.
